 Made by Susutawari
Made by Susutawari回して、止めたい
ブラシレスモータを回したいのだ。 ネットを検索すれば、ただ回すだけであればごまんと情報がある。(120度(矩形波)通電、180度(正弦波)通電などだね) ただ、多くは回した。回った。 で終わってしまっていて、今回私がやりたい特定の位置で止める であったり 一意のトルク値にコントロールするであったりが出来る感じじゃなさそうだった。 今までブラシレスモータを自力で回すって事をしてこなかったので、取り敢えずはただ回す所から始めようと思っている。
- 120度通電で回す
- 180度通電で回す
- ベクトル制御する
- 位置制御する
こんな感じだろうか。
ハードウェア
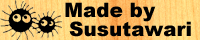
正直まだ何が必要で、何処がサボれるのかは分かっていない。 一番初めに作るテスト回路なので、回路的に比較したい部分は冗長的に作ったりしている。 センサレスにあまり興味はなく、最終的に位置センサからのフィードバックでビシッと指定した位置にロックして欲しい。 モータは位置センサがついたブラシレスジンバル用を使うつもりでいる。 位置センサはams社のAS5048Aという、SPI I/Fの14bit絶対位置エンコーダが付いている。 将来ちょっとやりたい事があって、エンコーダとしては一般的なインクリメンタル(A,B相)エンコーダも接続出来るように考える。

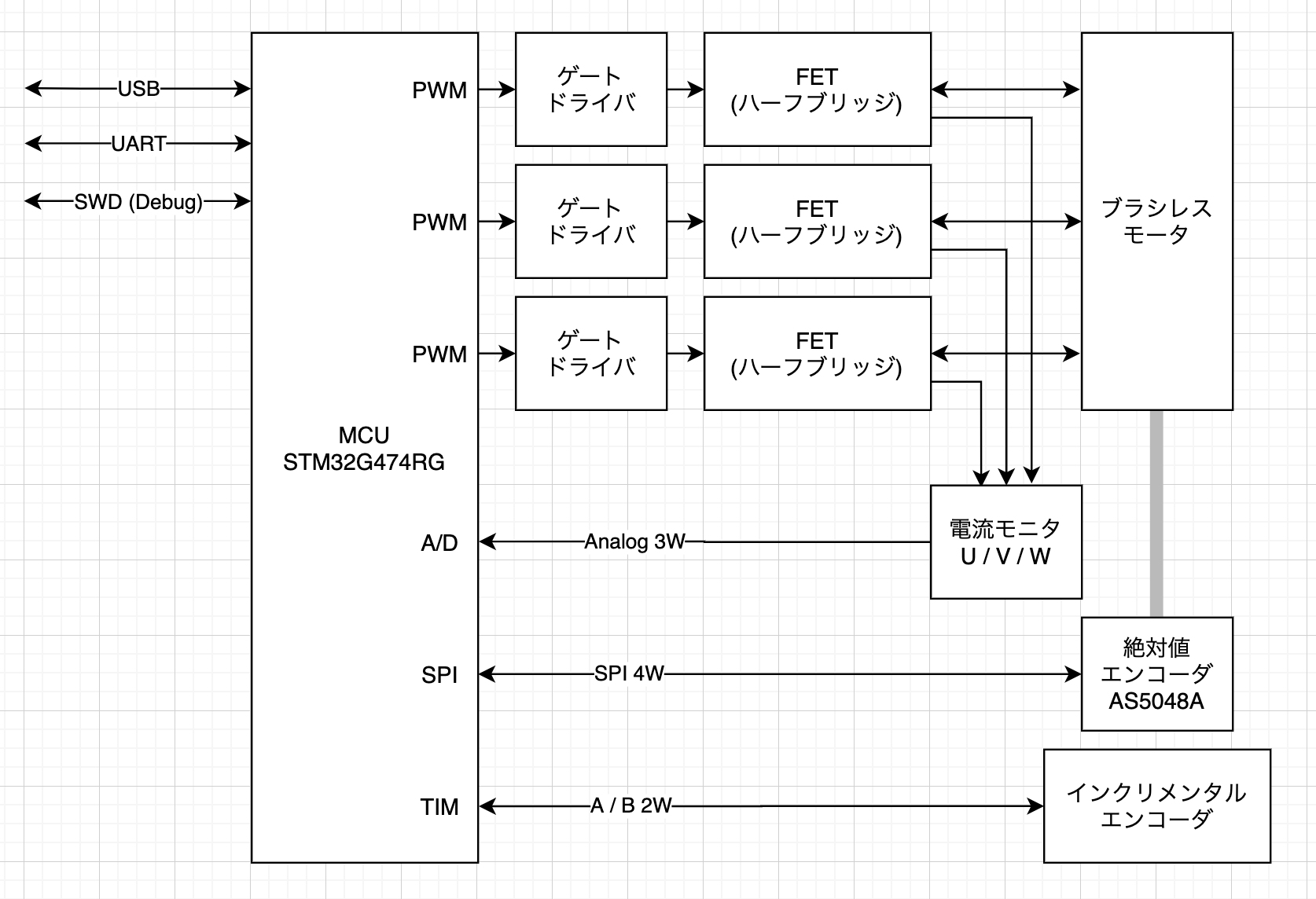
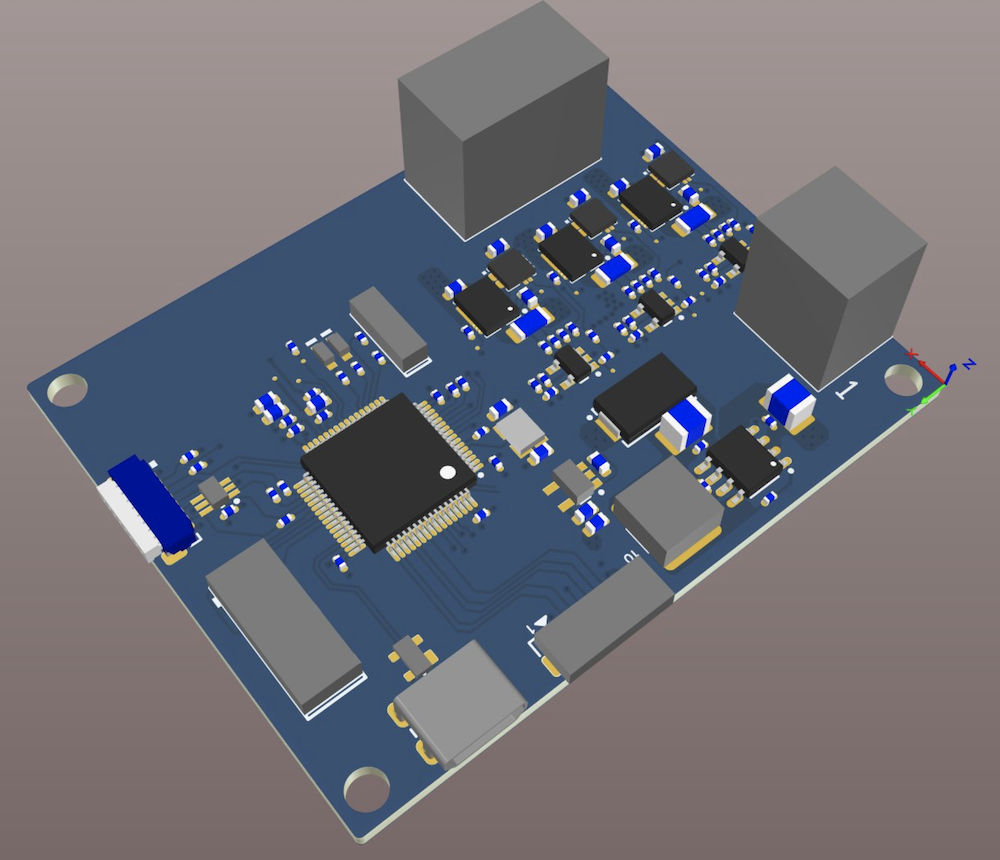
さて回路だが、まぁこんな感じだ。 ほぼ回路図==ブロック図なので、詳細は割愛する。 今回、データ取りを目的に電流モニタを2種類搭載している。 モータの線に直接入れる形でホール効果を利用した電流センサ、ハーフブリッジのGND側にシャント抵抗。 ゲートドライバとハーフブリッジはCSD97374Q4Mという一体化されたデバイスを利用する。 MCUはSTM32G4シリーズ。 最大170MHzで回って数十mAしか消費しない。すごい。 今回は最終的にPI制御を数十kHzの周期で回したりとパワーが欲しいので採用した。
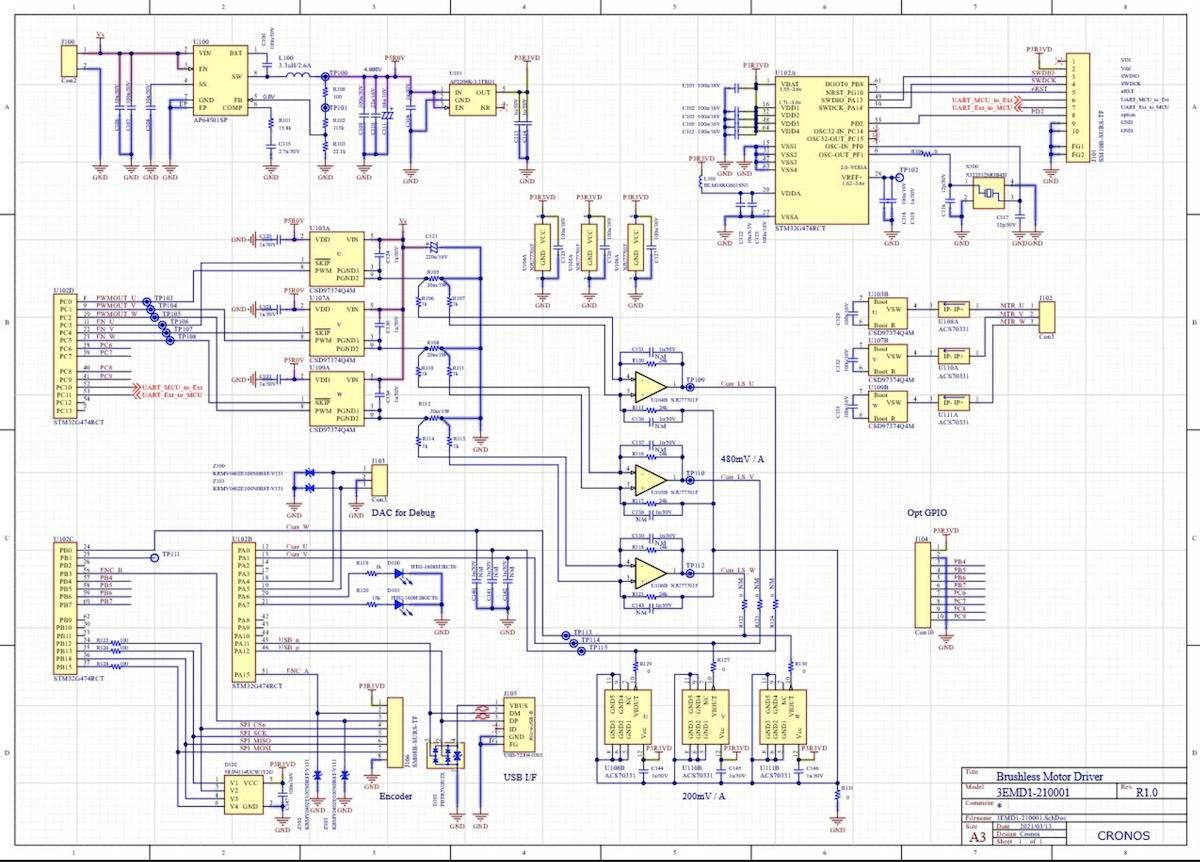
今回は回路規模もそこそこ大きくなったので基板を起こす。 4層1.6mmの貫通基板。 pcbway に発注する予定。 pcbwayは格安で基板を製造出来るサービスの一つで、特殊な仕様(特に厚い銅箔。最大13oz!)の基板に 対応していたり、3Dプリント、CNC切削、板金、プラモールドと本当に基板屋さんかな? と思うような ラインナップとなっている。 CNC切削は一度やってみたい。 ABS,ナイロンは当然のこと、PTFEやPEEKまで対応してる模様。 (幾らするんだろう…
現在製造中。 板が来たらまた続きを書こう。
Comments